Robots are programmable electronic mechanisms that have been developed to help, collaborate or even replace human beings, if necessary, in very detailed, repetitive, complicated, difficult or dangerous activities. They can perform complex movements with speed, strength and a high degree of precision superior to those performed by human beings, in a repetitive, safer and more economical way. This is achieved through the integration of mechanical, electrical, electronic and computational systems within the same programmable device with automatic control, called Robot. The term "robot" was coined by the Czech dramatist Karel Căpek in 1921, who in his work R.U.R. (Rossum Universal Robots) called it "robotnik", although later it was called "roboti", since the word Robota in Czech means Work or Labor, meaning "Robot" as forced labor or servitude. Currently, it is considered that "a robot is a computer with movement capacity, able to develop multiple tasks in a flexible way according to its programming" [1]. Robotics is the technology that brings together various areas of engineering and mathematics for the design, construction, operation, manufacture and application of robots in the daily lives of human beings. For its part, Mechatronic Engineering is the union of Mechanical, Electronic, Computer and Control Engineering, achieving systems with intelligent products or processes aimed at facilitating the activities of the human being. Mechatronics is the science that studies robots that are controlled through a series of instructions contained mainly in software programs.
The basic idea about Space Robots is to use Artificial Intelligence to teach robots about what they must do to behave in a similar way to human explorers. These Robots are intended to explore the surface of planets, including the Moon, and for that they are able to "think" themselves about possible obstacles they may encounter and that of course have the ability to recover from unexpected events.
Another concept in the design of Space Robots is that they can emulate, not only the process of human thinking and analysis in determining terrain features, but also the human ability to drive a vehicle in real time.

Application of space robots
Space Robots
Operation in the space environment.- Since its inception, robots were designed to work in support activities for humans, which is why the vast majority of robots are close to, if not next to, humans with whom he collaborates Since human beings are on the surface of the Earth since we need to be inside the atmosphere to survive, this is where you can also find almost all the robots that exist today. However, since the beginning of the Space Race and Exploration for the Conquest of Space, at the beginning of the 1960s, robots have been used to support these space activities, which, although primitive in their beginnings , have greatly increased in their capacity and quality of operation, improving their design, performance, characteristics and technological complexity for use in space. These robots are known as Space Robots, and they are divided into two branches: the Humanoid Support Robots, and the Planetary Rovers, and both will be mentioned below. It is important to clarify that space robots have a fundamental advantage over the human beings they support during their space activities: in addition to the advantages of greater strength, speed, precision, safety and economy of use with respect to humans, as well as the Lack of rest, clothing and feeding for the robot, human beings require an artificial atmosphere to live while we are out of the Earth, aspect that robots do not need to be able to operate correctly. This extra advantage makes the space robots extremely attractive for their operation and support outside the Earth, so at the moment there is a lot of interest in Space Mechatronics. The difficulty, complexity, cost, and associated danger of having an artificial atmosphere outside the Earth, are greatly reduced by having robots that can replace humans in outer space. The robots can be designed to withstand the extreme temperature, radiation, microgravity and vacuum present in outer space, reducing the risks for astronauts off the Earth either on the International Space Station (ISS) or in manned rockets and capsules, through humanoid robots of support, or replacing them with planetary rovers where the costs, duration or risk of the mission so require it. Following is a brief description of both types of space robots.
Planetary Rovers
A Planetary Rover is a mobile space exploration vehicle designed to travel the surface of a planet, moon, asteroid or any other space body. They require for their operation radio links with a semi-autonomous remote control, and with a delay time proportional to their distance from Earth. The rovers began to be used in the 1960s to explore the Moon, initially, and Mars later, being used both by the extinct Soviet Union, today Russia and neighboring countries, and by the United States through NASA.
Launch
A planetary rover is part of the necessary equipment for a mission of exploration and research in some other celestial body outside the Earth. In general, a mission is planned that includes the use of instrumentation and scientific technology for the study of the atmosphere, soil, radiation or any other parameter that a space agency considers important to better understand the characteristics of the celestial body. The planetary rovers are launched from Earth inside a capsule with remote control by powerful rockets, in trajectories that can take days, weeks, months or years to reach their final destination. Once the capsule approaches the planet or moon of its destination, it is placed in a circular orbit on its surface, looking for the appropriate place for the landing phase of the earth segment, while a part of the capsule remains in orbit over the planet or moon, to make the relay of radio signals remote control of the rover. The land segment includes the rover and its control base, which land on the surface by means of small rockets and / or parachutes, and are deployed for later operation controlling the remote activities of the rover. A rover can study physical, chemical or biological parameters of the atmosphere and surface of the planet under study, through a series of instructions and actions previously programmed by the space agency on Earth, prior to the launch of the rover. In all cases, the handling, use and control of planetary rovers must consider a delay time of the control signal due to the great distance between the Earth and the planet on which the rover is working, which doubles the Download the monitoring information on the return link.
Some examples of planetary rovers (date and their country of origin) are the:
Lunokhod series 1, 2 and 3 in the 1960s (to the Moon, sent by the USSR).

The Lunar Rover Apollo (1960s and 70s (Luna, USA)

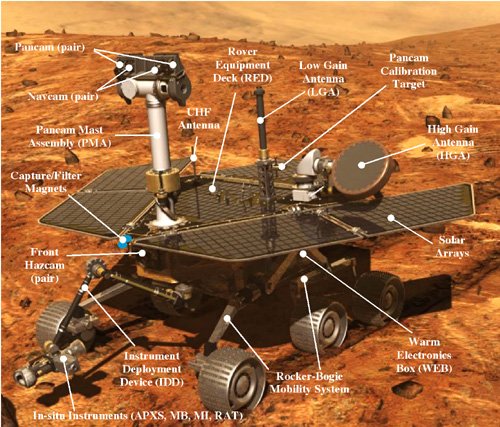
The rovers Sojourner (1998)

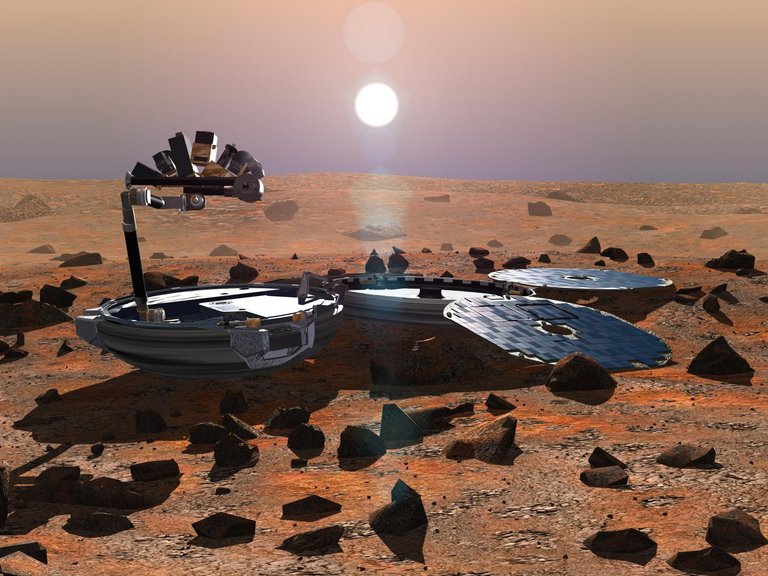
Beagle 2 (2003)
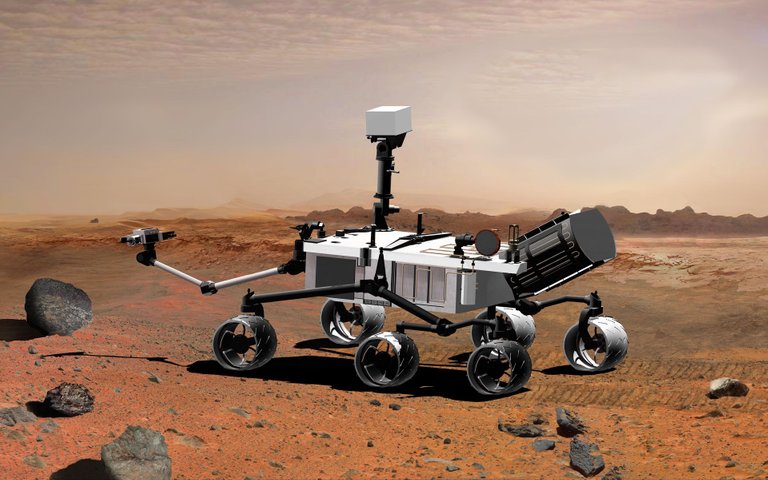
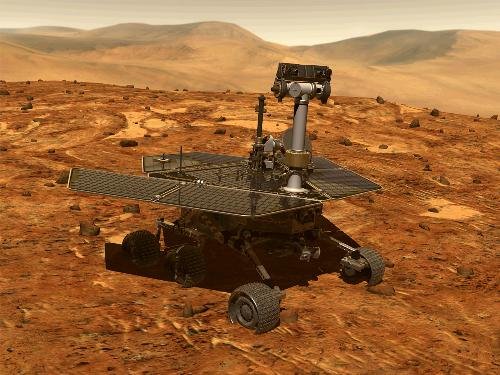
Opportunity (2004)
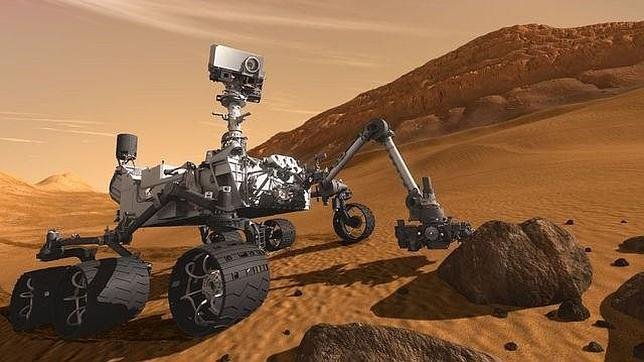
Curiosity (2011)
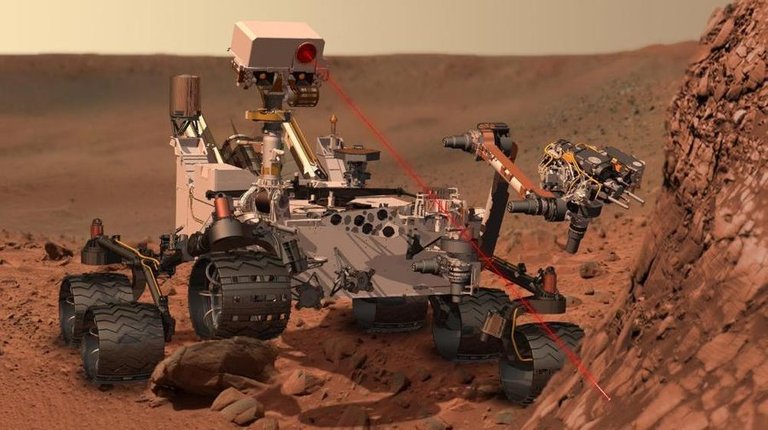
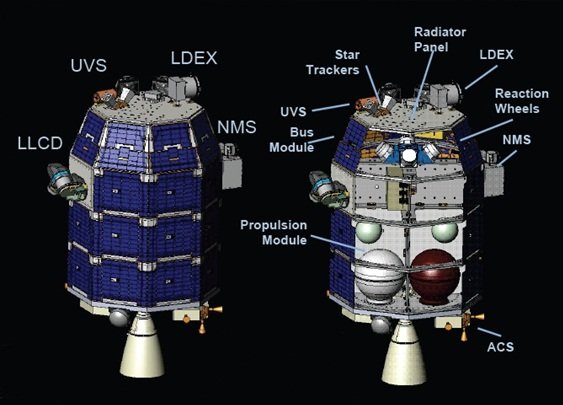
All those mentioned above were sent to Mars by the USA. Finally, on September 6, 2013, NASA sent a robotic mission to the Moon, called LADEE (Lunar Atmosphere Dust Environment Explorer), to orbit the Moon and send information about its atmosphere, surface conditions, and environmental influences. of the lunar dust.
LADEE (2013)
Honestly, these topics are my passion, I'm thinking of doing a post where I will be talking, in more detail, of these wonderful space robots, I hope my dear Steemians, my post is to your liking, I have no choice but to say goodbye and thank you Everyone who reads my publications, I say goodbye, wishing you the best.
For more information visit this pages:
https://www.elconfidencial.com/tecnologia/2016-08-06/curiosity-marte-nasa-espacio_1243195/
http://rotspac.blogspot.com/
http://haciaelespacio.wixsite.com/haciaelespacio007/robots-espaciales
Atte.
@daylen
Wow sangat bagus,itu sangat perlu untuk masa depan, sebuah kemajuan teknologi yang luar biasa @daylen